
〒541-0053大阪府大阪市中央区本町一丁目3番15号 本町NXビル3階
〒460-0008 愛知県名古屋市中区栄5-26-39 GS栄3階
〒151-0072 東京都渋谷区幡ヶ谷1-2-2 京王幡ヶ谷ビル4階
定休日 :土曜・日曜・祝日






選ばれる理由-Why ?
- 物や人の動きを3次元データ化するのが簡単
- 国内実績No.1のモーションキャプチャー (学術論文も多数)
- 準備が簡単で計測工数90%カットできた
- 今まで計測できなかったものが数値化できた
- 人の動作や手などの部位計測に最適
- ロボット位置測位、制御に最適なツール
システム概要
OptiTrack(オプティトラック)はモノや人の貼り付けたターゲットマーカーの位置を、カメラ複数台で撮影し、3次元データを計測する、光学式のモーションキャプチャーです。非接触で高精度に動きを可視化できるソリューションです。
システムの特長
高精度での3次元計測を実現
マーカーを貼り付けるだけで、対象の動きを0.1mmで計測が可能です。ch数も100ch以上同時に計測ができ、尚且つ3次元で行います。光学式モーションキャプチャーとしては世界最大級の精度を保持しており、人外の工業計測や変位計測でも多く実績がございます。

リアルタイム性/制御
3D座標をリアルタイムに外部に吐き出しが可能です。遅延も5ms以下とリアルタイム性に優れており、ロボットの制御やVR/ARなど、リアルタイムに処理したい技術にも応用が可能です。

人の動きなどの複雑挙動も追従
人の全身はもちろん、手、指など限定した箇所も正確に計測ができます。屈曲、伸展、回転などの複雑な動きにも正確に座標を吐き出します。リハビリやスポーツ動作といったバイオメカニズムの追求には欠かせないツールとして、全国様々な機関で運用いただいております。
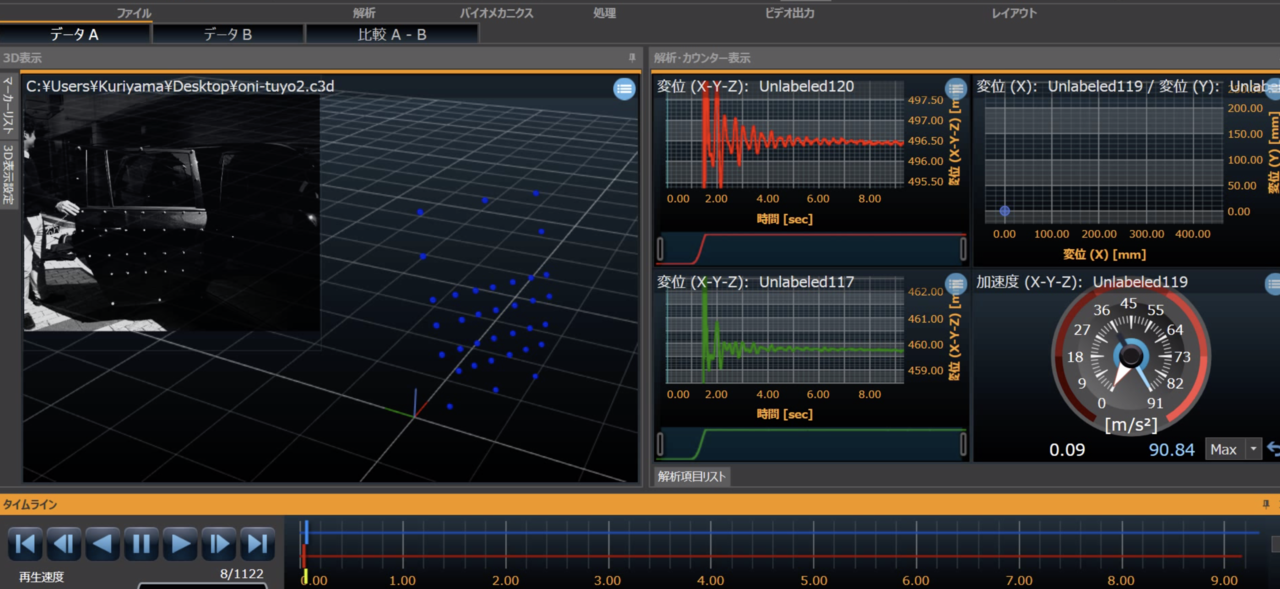
リアルタイムでの解析モニタリング
画像処理では難しいとされている、リアルタイムでデータを受け渡しできます。変位や加速度などをリアリタイムに処理し、モニタリングができます。実験中に大変便利です。
準備から計測までのSTEP
STEP1
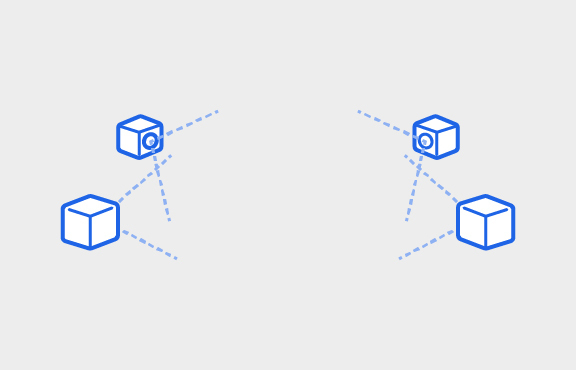
カメラ設置
トラッキング対象のセンサーを認識できる位置に「OptiTrack-オプティトラック」カメラと治具を設置。3次元座標をより正確に取得するには奥行き方向の平面情報を得るために、カメラ3台以上が必要です。
STEP2
キャリブレーション
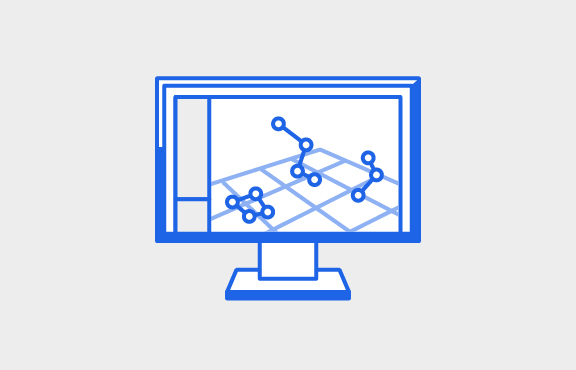
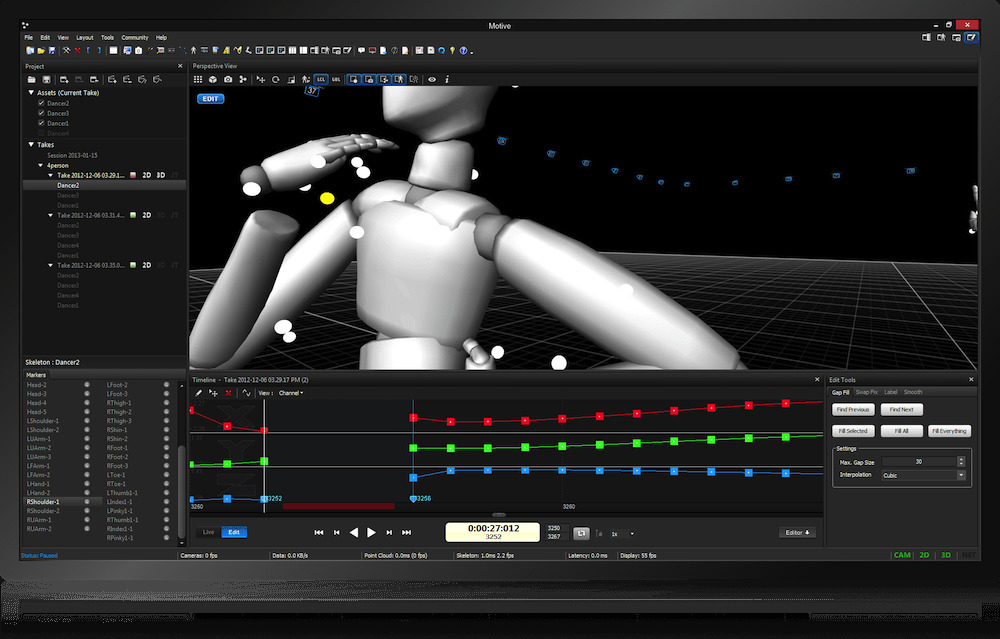
複数台のカメラの互いの位置と向き、角度、および空間上の原点(0点)と座標軸(X,Y,Z)を定義します。これはソフトウェア「Motive」上でカメラ位置と角度を把握し、3次元空間内での対象の動きの座標データを正確に認識するためです。
STEP3
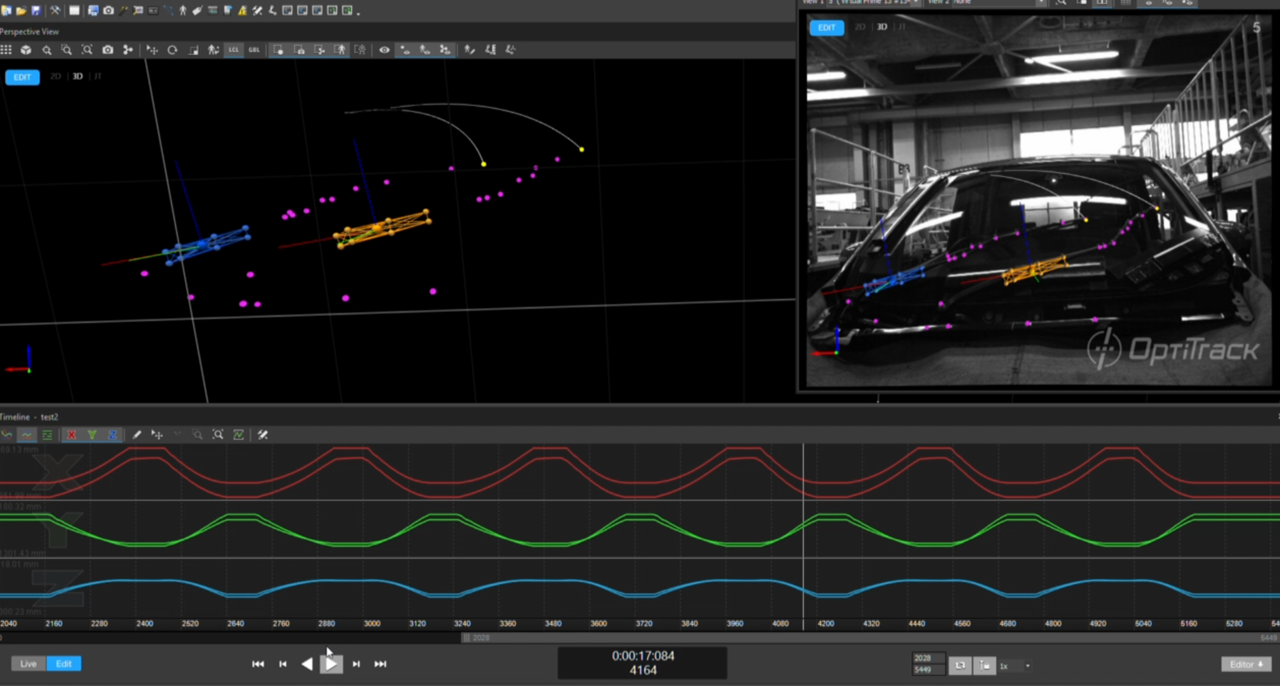
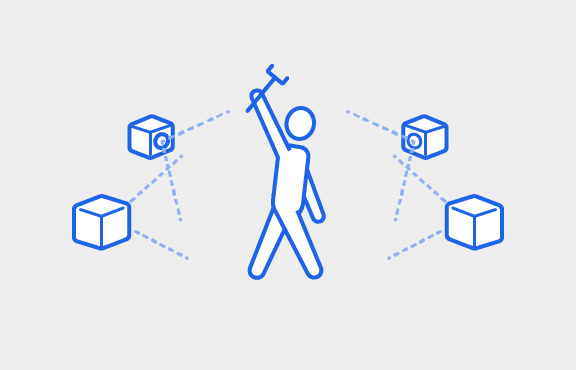
計測/トラッキング
構築した計測空間内で動く対象の座標データをトラッキング。「OptiTrack」は座標データのみを取得するため、VRやARコンテンツとの連携や、対象の動きを数値化し、解析するためには別途専用のソフトウェアやプラグインが必要です。

STEP4
データ出力/解析/レポート作成
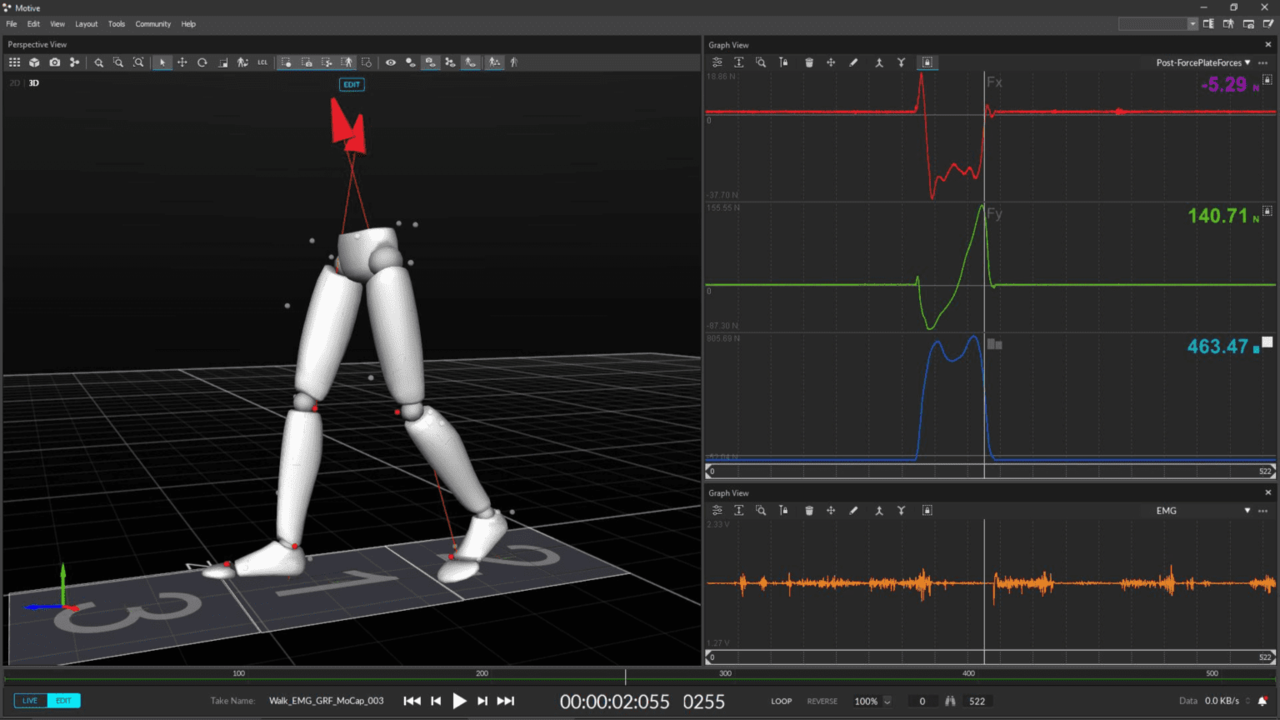
「Motive」から取得した座標をリアルタイムに外部に出力、またはCSVやテキストファイルに出力が可能です。別途専用のソフトを使うことで、リアルタイムにグラフ化したりなども対応しております。

カメラの選定方法や理由をご紹介します。
専用ページご紹介

解析専用ソフトSKYCOM
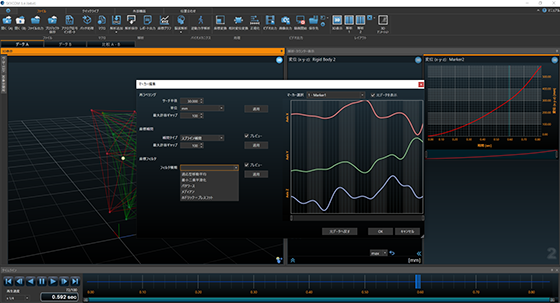
Motiveで取得した座標値を、解析したい各項目に計算し、挙動を解析できる専用ソフトウェアです。Motiveからリアルタイムでデータを受け、グラフやモニタリングにも対応しております。


用途、導入事例
・プレス機治具の挙動計測 ・プレス金型の挙動計測 ・設備の振動計測
・ロボットの先端位置測定 ・ロボットの繰り返し精度確認・ロボットティーチング
・振動台での構造物実験 ・反力壁を用いた木造実験 ・建材の振動解析
・鉄鋼の静的座屈試験 ・コンクリート(RC)の静的圧縮試験
・車ボデーの挙動試験 ・サスペンションの計測 ・窓と窓材の動的挙動
・ワイパーのビビり解析 ・自動車振動計測 ・走行時の部品挙動計測
・搬送機の移動精度確認 ・サッシ、引き戸の挙動計測 ・ゴムの変位測定
・ドローンの飛行制御 ・ローバーの挙動解析 ・回転体の回転数
・2輪チェーンのたわみ測定 ・エンジン全体の変位測定 ・船模型の位置計測
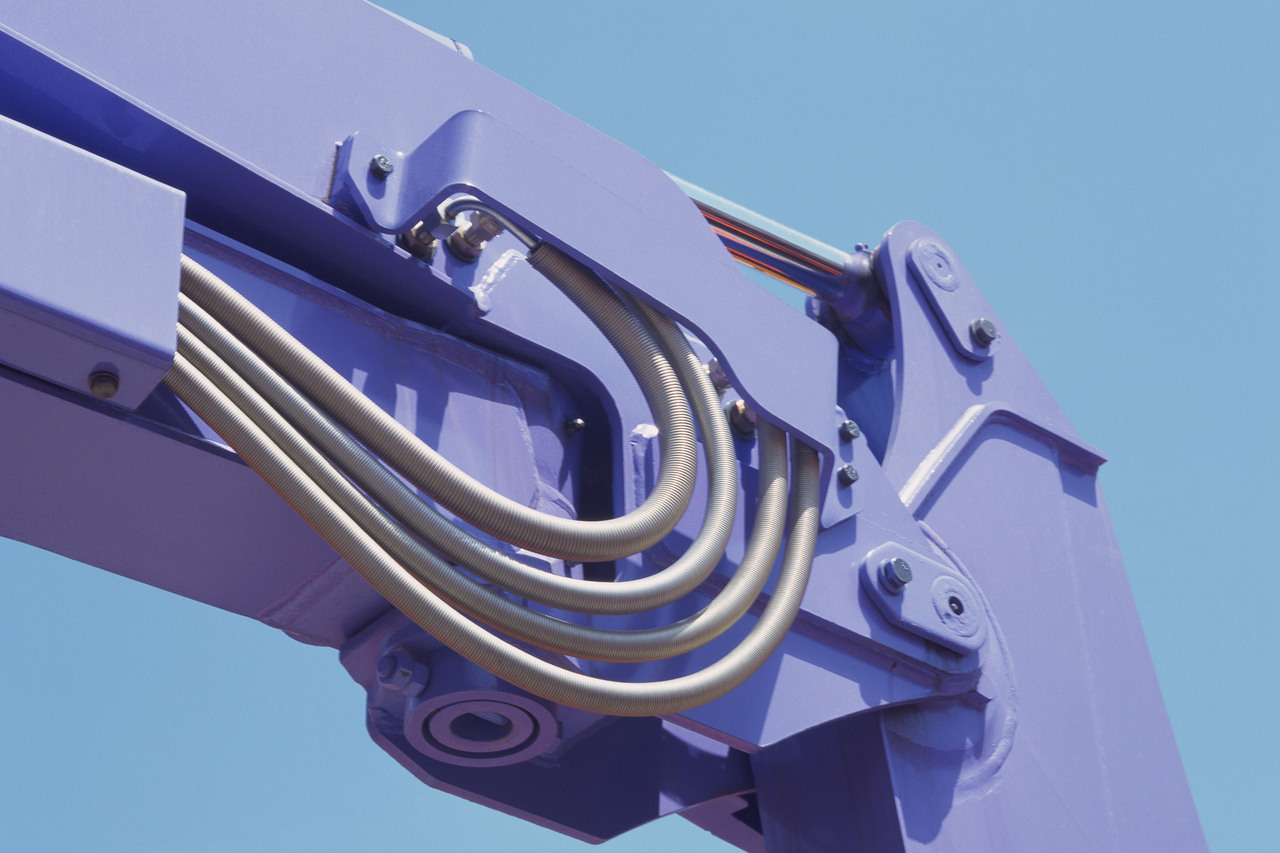
・重機の全体挙動解析 ・ダミー人形の位置確認用 ・ブレース試験
・浴室の変位計測静的 ・フィルムの3次元測定 etc.
導入事例
ロボット/ドローンの挙動計測/制御


ロボットの先端位置やドローンの制御
ロボットの先端位置計測/ドローンの制御/ロボット繰り返し精度検証
ドローンの制御研究でよく実績がございます。大学や民間企業の研究所で制御ツールとして標準化されてきております。又、ロボットの挙動確認や精度確認でも多数実績ございます。
【他用途例】溶接ロボット先端位置計測、陸型ドローン制御
自動車部品、ボーデーの評価
車体部品(ドア、ワイパー、サスペンション、ガラス)などの挙動計測に最適です。センサなどのように配線不要で、工数を50%以上削減可能です。
【活用事例】
ハーネスの揺れ、ルーフの挙動、キャリアなどの搬送機の挙動、設備の振動計測、車体剛性など。
大型振動台での構造物加振試験【振動台】

兵庫県にある「E-ディフェンス」にて計測した事例です。従来はひずみゲージや変位計を数百ch繋ぎ、計測するまでの前準備に大変時間がかかっていました。工数削減がテーマでお手伝いさせていただきました。
カメラを30m以上離れた位置に配置し、20mくらいある建物全体の変位や速度を解析いたしました。
コンクリートの静的変位試験【静的】
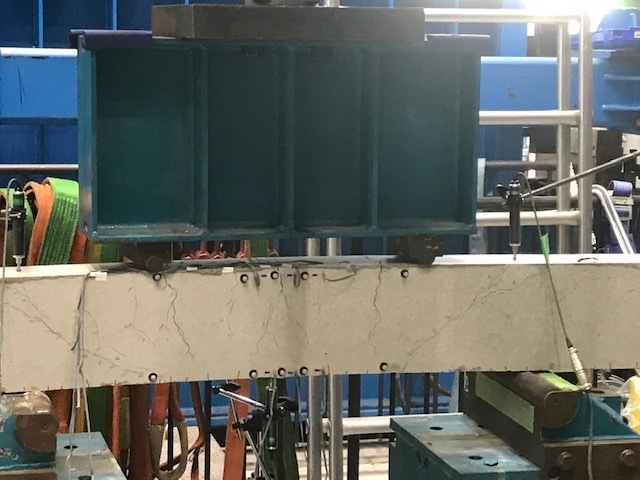
コンクリートの静的試験にて、採用いただいた事例です。
カメラ4台を使用し、0.03mm精度で変位を計測いたしました。多点を同時に数十点〜数百点計測が可能です。
2023年日本建築学会構造系論文集に名古屋大学の浅井竜也先生の論文が掲載されました。
自転車のチェーン計測【回転体】
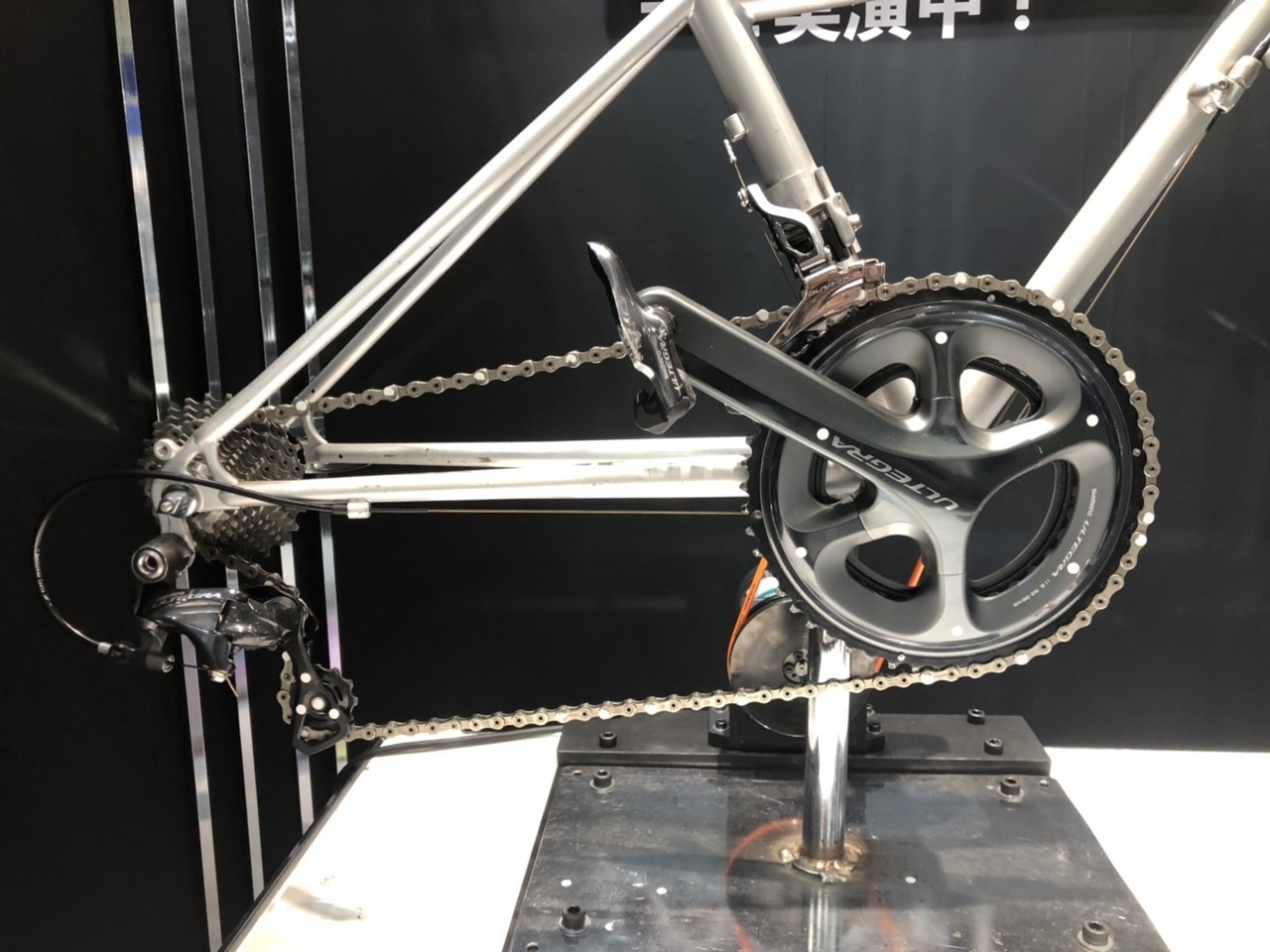
回転体の計測も可能
駆動部品の挙動計測
回転体や複雑な動きをする対象でも3Dで追従可能です。従来技術では計測が困難、全体挙動を可視化したいお客様に最適です。
【他用途例】自転車部品挙動、自動車ベルト、二輪車チェーン計測
仕上げ作業【技術伝承】
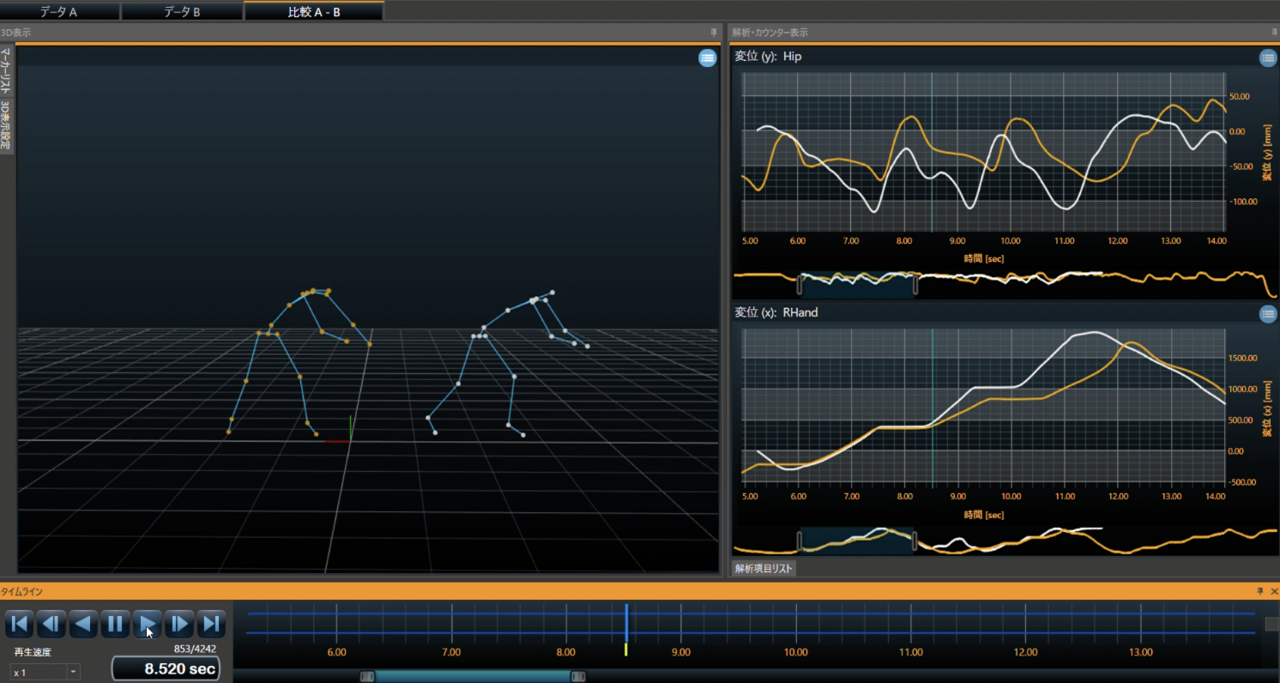
コツや感覚を可視化可能
カンナがけの工程で全身をくまなく計測した事例となります。
動画だけでは分からない、コツや感覚を数値化することで定量的にデータを取得し、作業効率の改善や傾向チェックすることが可能です。熟練者は体全体をうまく使えているのは「何故か?」を解明できます。
手指の計測
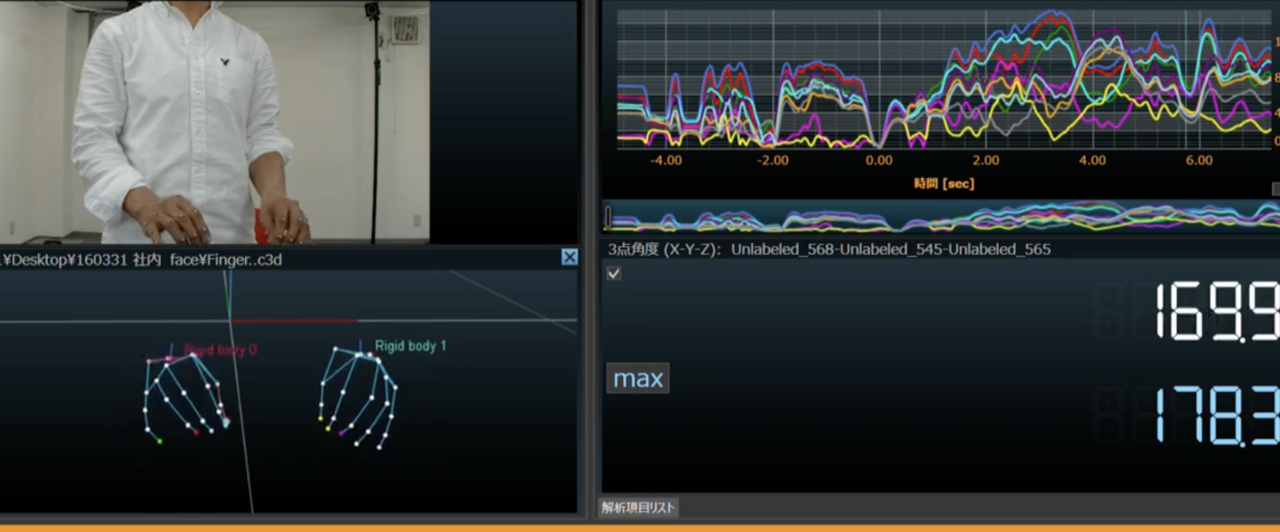
手や腕などの計測も正確に計測
指や手の動きも3次元で精密に計測可能です。リハビリ病院などでの歩行解析や患者さんの計測にも多く実績がございます。ちょっとした計測で使用した、持ち運びできるシステムが良いなどに最適です。
【活用事例】歩行解析、スポーツ動作
お客様の声
操作が簡単で、解析も楽に行えました
製造業
設備の中にあるロボットの挙動を計測したく導入いたしました。狭い空間ではあったものの、広角に計測できる機種があり、目では見えない微細な挙動を可視化することに成功しました。不具合特定や品質向上に貢献できており、この設備以外の用途でも活躍が見込めそうです。個人的に解析ソフトのデザインが気に入っております。
研究室のスタンダード計測機器になりました
大学教員
研究は、主にロボットや人をターゲットとしており、古いモーションキャプチャーは所持しておりました。エースポイントさんから「OptiTrack」を紹介していただき、キャリブレーションの速さや精度の高さに驚きました。屋外でも使用できることがわかり、卒論や修論で活躍しております。年末になると取り合いになり、結果2セット所持しております。リーズナブルな価格設定も大学にとっては嬉しいです。
大規模空間での計測も1人で行えるのには驚き
物流業界
搬送機やフォークリフトの挙動や制御ができるものはないか?検討しておりました。事前情報は伺っていたものの、遅延もなくデータの受け渡しができ、搬送ルートのチェックも容易でした。キャリブレーションやオペレーションが簡単で、1人でも計測を行えるのは、さすが最先端技術だなと感心しております。カメラの外観も惹かれるものがあり、今では施設の見学コースに組み込んでおります。
不具合の傾向をキャッチできた
自動車製造業
設備の異常なのか、人の作業時のミスなのかを検証する為にOptiTrackを導入しました。結果、作業時の軌跡が人によっては不具合につながることが分かり、統計データにも落とし込むことができました。課題としては、ラインに常時設置が困難な点が解消できればより多くのデータを取り込むことができますので、そこだけが課題です。
WEBセミナー
CONTACT
お問合せフォーム
以下のフォームに必要事項をご記入の上、「送信する」ボタンをクリックしてください。
NEW & TOPICS
ソリューションご案内

拠点一覧
大阪本社
〒541-0053 大阪府大阪市中央区本町一丁目3番15号 本町NXビル3階
TEL:06-6311-3770
名古屋オフィス
〒460-0008 愛知県名古屋市中区栄5-26-39 GS栄3F
TEL:052-263-0039
東京オフィス
〒151-0072 東京都渋谷区幡ヶ谷
1-2-2 京王幡ヶ谷ビル4階
TEL:090-6038-8536
営業時間
9:00~18:00
フォームでのお問合せは24時間受け付けております。
定休日
土曜・日曜・祝日