
〒541-0053大阪府大阪市中央区本町一丁目3番15号 本町NXビル3階
〒460-0008 愛知県名古屋市中区栄5-26-39 GS栄3階
〒151-0072 東京都渋谷区幡ヶ谷1-2-2 京王幡ヶ谷ビル4階
定休日 :土曜・日曜・祝日
OptiTrack3次元の原理とキャリブレーション
3次元化の原理
モーションキャプチャのカメラで認識されるのは、カメラから平面として見えるマーカーの位置(2次元座標)です。「キャリブレーション」により、複数台のカメラの互いの位置と角度が定義され、そのキャリブレーション情報と各カメラの2次元座標の情報を組み合わせることにより、3次元座標が算出されます。
エピポーラマッチング
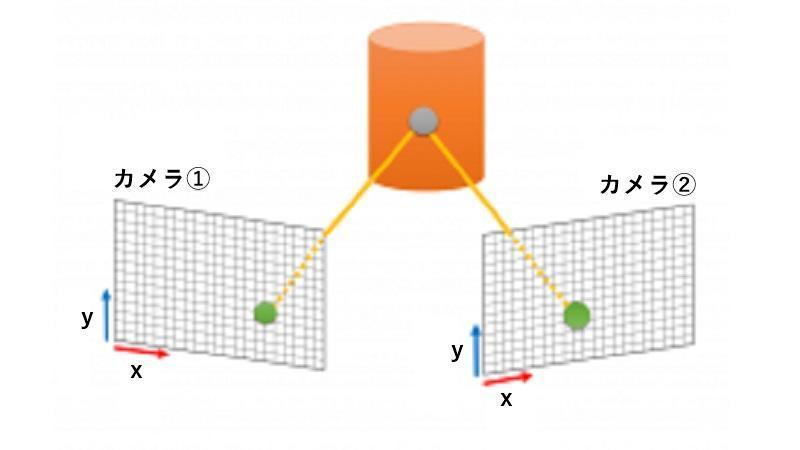
※最低2台のカメラから見えないと3次元計算できません。
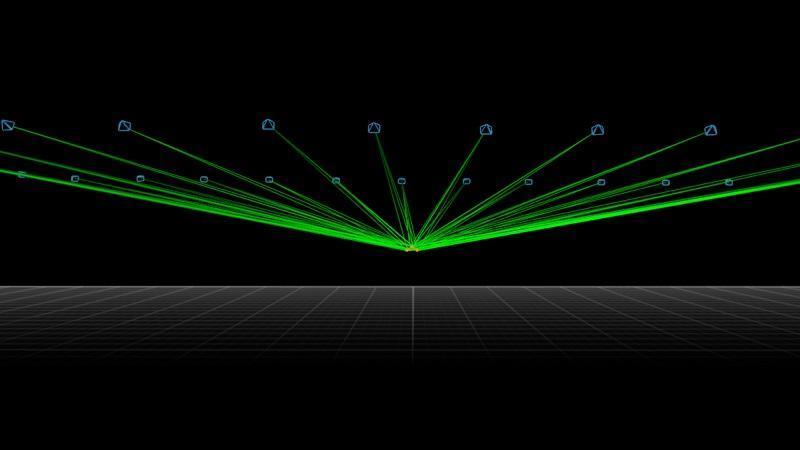
カメラで認識されたマーカーの位置(2次元座標)と「キャリブレーション」で定義されたカメラパラメータ(空間上の位置と姿勢)から三角測量の原理で3次元座標を計算します。
カメラ平面の座標から3次元空間上に仮想の垂線を引き、別のカメラ平面からの仮想垂線との交点を見つける事で3次元位置を特定します。この原理を「エピポーラマッチング」といいます。
エピポーラマッチング
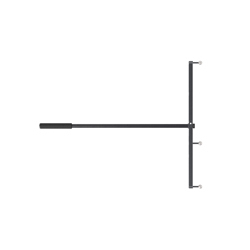

カキャリブレーションとは、複数台のカメラの互いの位置と角度、および原点と座標軸を定義することです。まず、ワンド(または、キャリブレータ)といわれる3つのマーカーが一列に並んだもので、空間のキャリブレーションを行います。ソフトウェアにその3つのマーカーの位置(左と右のマーカーの距離と中央と左右いずれかのマーカーの距離)を入力します。カメラを配置した後、そのキャプチャボリューム(カメラで囲まれた空間)内で、ワンドを振り回します。これでカメラ平面の位置と角度がソフトウェアで自動的に計算されます。
続いて、グランドプレーン(またはキャリブレーションスクエア)といわれるL字型にマーカーが配置された治具で、空間の原点とXYZの軸を定義します。キャプチャボリューム上の原点にしたい位置、座標軸の向きにグランドプレーンを置いて、ソフトウェアに認識させます。
この2つの定義で、キャリブレーションは完了です。
NEW & TOPICS
ソリューションご案内

拠点一覧
大阪本社
〒541-0053 大阪府大阪市中央区本町一丁目3番15号 本町NXビル3階
TEL:06-6311-3770
名古屋オフィス
〒460-0008 愛知県名古屋市中区栄5-26-39 GS栄3F
TEL:052-263-0039
東京オフィス
〒151-0072 東京都渋谷区幡ヶ谷
1-2-2 京王幡ヶ谷ビル4階
TEL:090-6038-8536
営業時間
9:00~18:00
フォームでのお問合せは24時間受け付けております。
定休日
土曜・日曜・祝日