
〒541-0053大阪府大阪市中央区本町一丁目3番15号 本町NXビル3階
〒460-0008 愛知県名古屋市中区栄5-26-39 GS栄3階
〒151-0072 東京都渋谷区幡ヶ谷1-2-2 京王幡ヶ谷ビル4階
定休日 :土曜・日曜・祝日

ロボット制御/計測ツール
ロボットの位置座標取得や制御、挙動計測やティーチングをリアルタイムで行えるツールです。製造現場でのロボットの挙動確認や、ドローンやクレーンの制御などに最適です。又、ワークがないとできないティーチもCAD情報があればワークなしにティーチできます。
多点を高精度で計測できる
ロボットの先端や各関節など、多点を同時で計測が可能です。多点を一度に計測することで「計測工数を半分以上に短縮」できます。精度は0.1mm以下で追従可能で、光学最高水準です。

計測工数を削減できる
キャリブレーションがすごく楽なシステムが売りで、カメラを設置さえすれば、即計測が可能です。今まで1点1点やセンサをたくさん設置していた準備工数が圧倒的に削減できます。ロボット設計や開発に向いております。
ストローク量の多いもの、計測空間が広くても対応可能
動きの大きいもの、死角が多いもの、複雑なものでも複数台あるカメラから見えていれば3次元で座標値や変位を計測できます。計測空間もカメラ台数を増やすことで、小規模会議室から体育館くらいまで幅広く対応ができます。
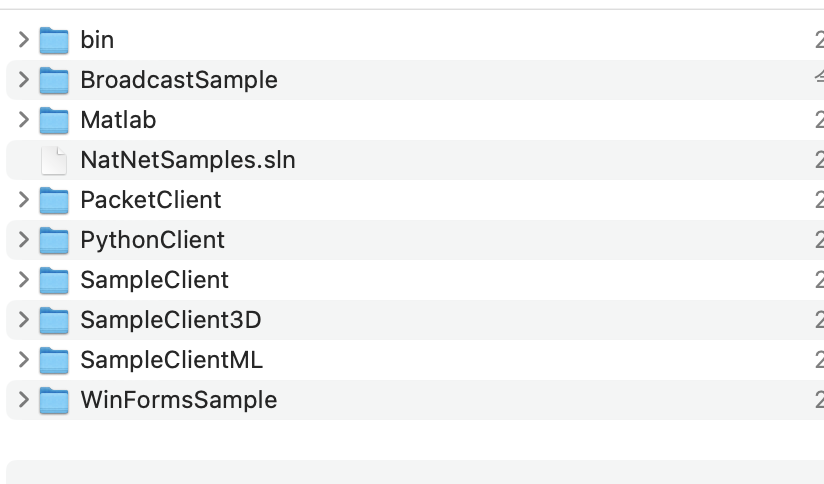
サンプルコードをご提供
リアルタイムでデータを受け渡しできます。よくあるブラックボックスはなく、サンプルコードも各種公開しております。
例:Python/MatLab/LabViwe/C/ROSSなど
STEP1
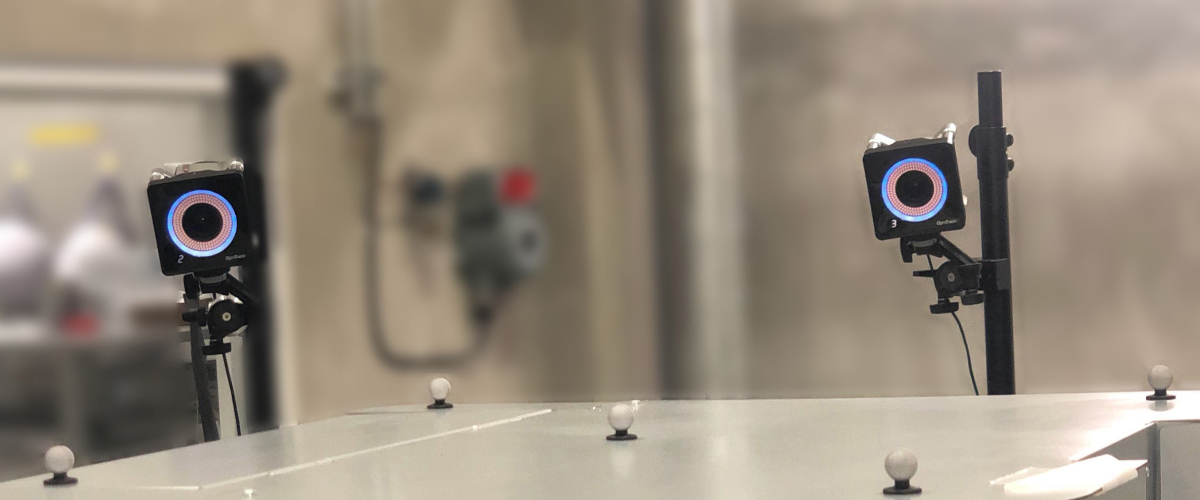
カメラ設置
トラッキング対象のセンサーを認識できる位置に「OptiTrack」カメラと治具を設置。3次元座標をより正確に取得するには奥行き方向の平面情報を得るために、カメラ3台以上が必要です。
STEP2
キャリブレーション
複数台のカメラの互いの位置と向き、角度、および空間上の原点(0点)と座標軸(X,Y,Z)を定義します。これはソフトウェア「Motive」上でカメラ位置と角度を把握し、3次元空間内での対象の動きの座標データを正確に認識するためです。
STEP3
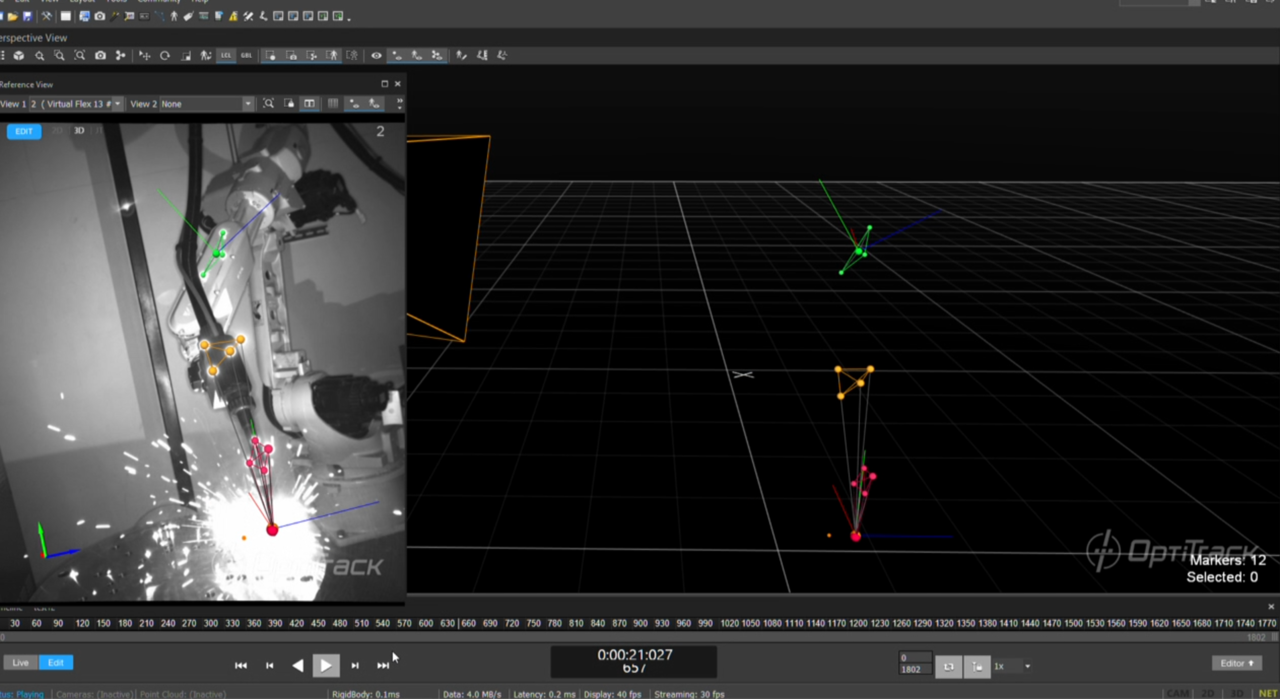
計測/トラッキング
制御用ソフトMotiveで、構築した計測空間内で動く対象の座標データをトラッキング。データ保存したり、編集、リアルタイム出力可能。

STEP4
データ出力/解析/リアルタイム制御
「Motive」から取得した座標をリアルタイムに外部に出力、ロボットを制御したり、CSVやテキストファイルに出力が可能です。別途専用のソフトを使うことで、リアルタイムにグラフ化したりなども対応しております。

カメラの選定方法や理由をご紹介します。
活用方法
ロボット/ドローンの挙動計測/制御


ロボットの先端位置やドローンの制御
ロボットの先端位置計測/ドローンの制御/ロボット繰り返し精度検証
ドローンの制御研究でよく実績がございます。大学や民間企業の研究所で制御ツールとして標準化されてきております。又、ロボットの挙動確認や精度確認でも多数実績ございます。
【他用途例】溶接ロボット先端位置計測、陸型ドローン制御
ティーチング
塗装ロボットのティーチング
ロボットティーチ/マニュピレーター制御
従来のペンダント位置決め手法ですと、直線的なティーチとなり、カクカクした動きになりがちです。弊社システムを介することで、人の動きのような滑らかな動きを再現できます。また計測にかかる工数も90%以上削減可能。
位置計測

AGVやAGFフォークリフトの位置計測
物流工場などで、AGVやフォークリフトの開発したものの、検証用に導入いただいている事例です。GPSよりも精度があり、30m x 30mなどの大空間でも対象の位置をリアルタイム且つmm単位で計測が行えます。自動化などの技術に貢献します。マテハン機器の開発、AGV、AGFの開発機の検証に最適です。
ワーク不要のティーチング
溶接ロボットの位置決め
溶接ロボットのティーチング
ワークがなくてもCAD情報があれば、ティーチ可能。ワークの入荷を待たずティーチできるので、工数が半分以上短縮可能。
ドローンやロボットの制御に最適
大学教員
研究室ではロボットハンドやドローンなど制御に関わる研究を行なっております。その為、「リアルタイムで位置情報を取り出すこと」、「ブラックボックスになっていない」ことが前提条件となります。こちらのシステムでは、多彩なサンプルコードがご用意してあり、今までのプログラムを大幅に改良することなく使用できております。構内の大規模空間でのドローン計測は学内外問わず人気のスポットになっております。
解析結果がわかりやすい
ロボット製造業
ロボットの検証確認用に導入いたしました。計測までの準備が従来使用していた物と比べ大変楽で、計測全体の工数も半日以上短縮しております。早いサンプリングで多点をリアルタイムに計測できる製品は少なく、ロボットのメンテナンスや検証に欠かせないものになっています。
大規模空間での計測も1人で行えるのには驚き
物流業界
弊社が製造している搬送機の位置計測/制御の為、システムを探しておりました。こちらの製品は、大規模空間でも高精度に位置情報を得ることができる点と、計測までの時間が早いという印象です。20m角程の空間ですが、mm単位で計測ができ、キャリブレーションが楽でテストがスムーズです。今後の改題でもある自動化に向けた課題の基礎データ取りも色々行なっていきたいと思います。
お問合せフォーム
以下のフォームに必要事項をご記入の上、「送信する」ボタンをクリックしてください。
NEW & TOPICS
ソリューションご案内

拠点一覧
大阪本社
〒541-0053 大阪府大阪市中央区本町一丁目3番15号 本町NXビル3階
TEL:06-6311-3770
名古屋オフィス
〒460-0008 愛知県名古屋市中区栄5-26-39 GS栄3F
TEL:052-263-0039
東京オフィス
〒151-0072 東京都渋谷区幡ヶ谷
1-2-2 京王幡ヶ谷ビル4階
TEL:090-6038-8536
営業時間
9:00~18:00
フォームでのお問合せは24時間受け付けております。
定休日
土曜・日曜・祝日