
〒541-0053大阪府大阪市中央区本町一丁目3番15号 本町NXビル3階
〒460-0008 愛知県名古屋市中区栄5-26-39 GS栄3階
〒151-0072 東京都渋谷区幡ヶ谷1-2-2 京王幡ヶ谷ビル4階
定休日 :土曜・日曜・祝日

ポカヨケシステム
工具や手問わずポカよけ
作業時の手や工具など、マーカーを貼れる、取り付けることができれば、位置や座標などがリアルタイムで取得できる。自由度が高いです。
計測空間自由自在
複数台のカメラで空間を構築することで、大きな空間や死角になる工程でもポカよけを可能。

わかりやすいソフト
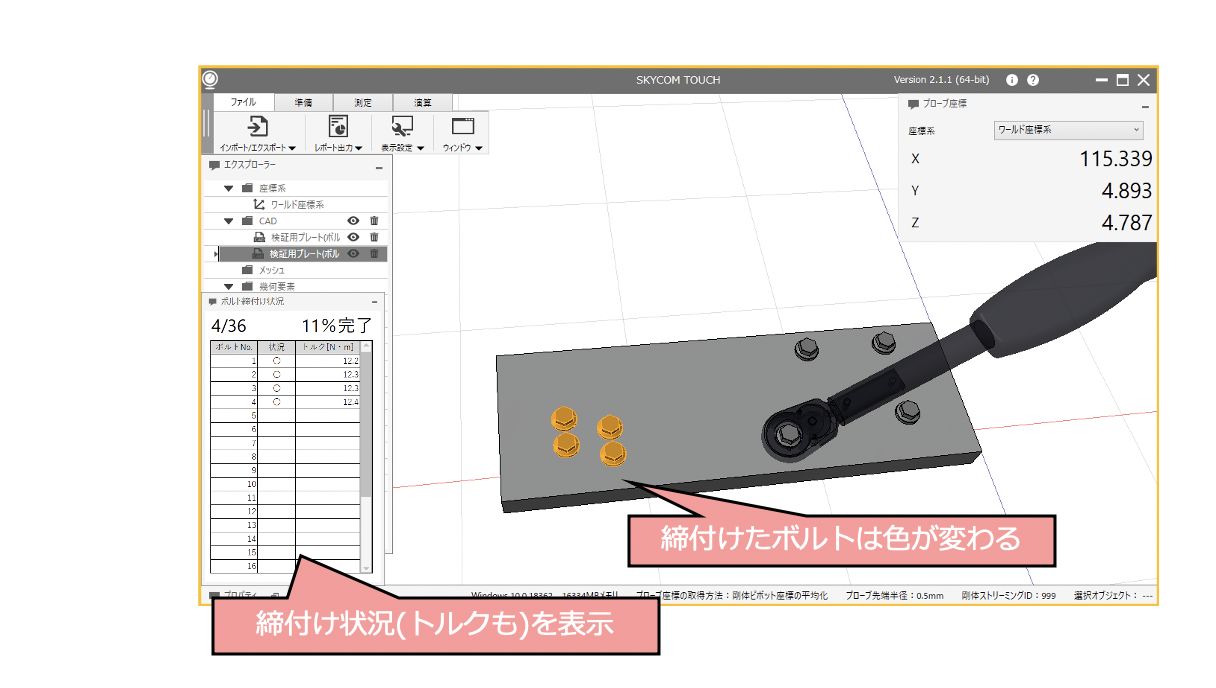
製品にネジを締めた場合、トルクレンチなどの工具のトリガーもしくは、滞留時間で自動的に締め付けた箇所を表示可能。

画像処理/機械学習を駆使して
WEBカメラ等のビデオ映像を元に画像処理、AI技術を使い、ポカよけも組めます。人の侵入、判定など様々で転用可能です。
ポカヨケを効率的に行うシステムとして、検討比較される代表的な3つのシステムをご紹介。
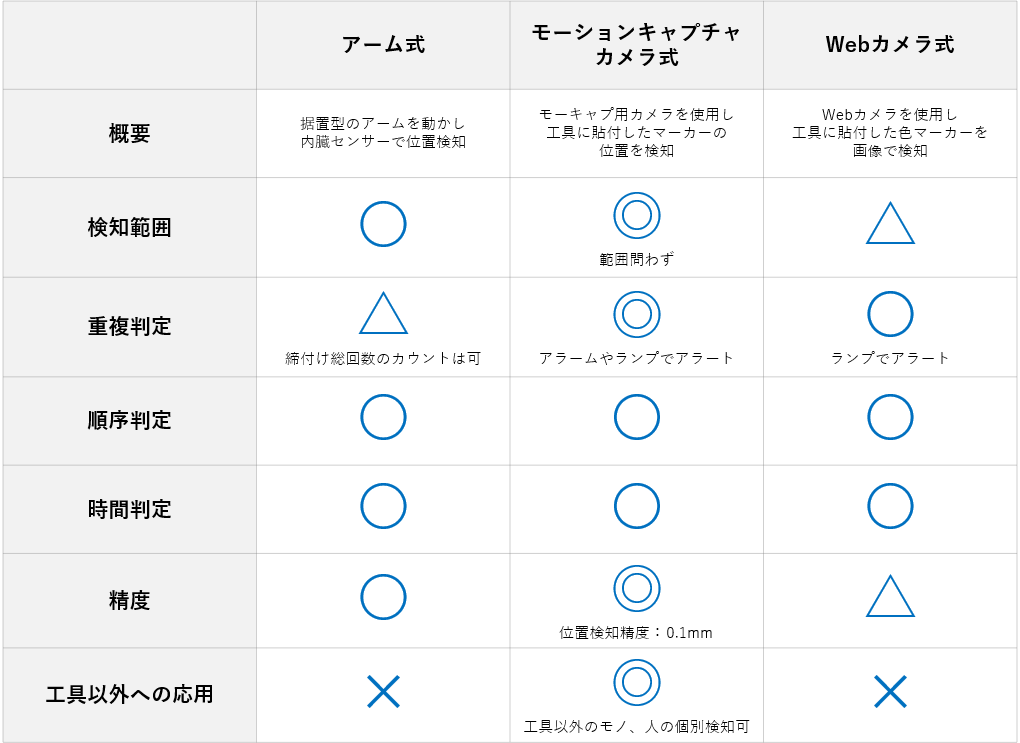
※製品比較結果は当社調べ。
acepointのポカヨケシステムは様々な外部機器と連携が可能で、幅広い設備に対応可能です。
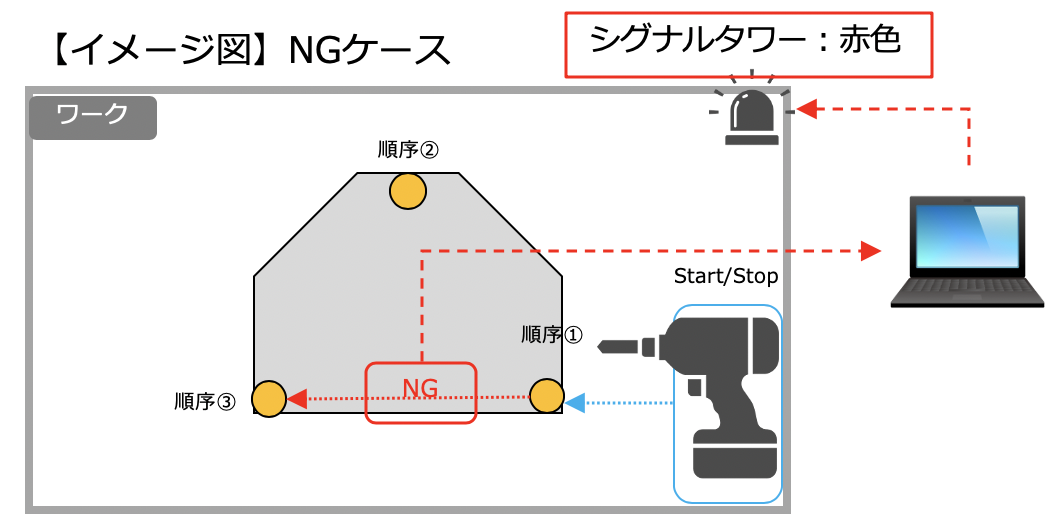
パトランプ、お客様設備
モーションキャプチャー側から信号を出力し、動作の制御を行う
具体例①:ネジ締め順序を間違った場合、パトランプを赤く点灯する
具体例②:作業員が進入不可の危険領域に入った場合、領域内の装置の動作を停止させる
デジタルトルクレンチ、ドライバ
工具側からのトルクや締め付け完了の信号を受信し、位置検知と複合して合否判定を行う
具体例①:「正しい位置」で「規定トルク」が入った場合に締め付け完了とする。
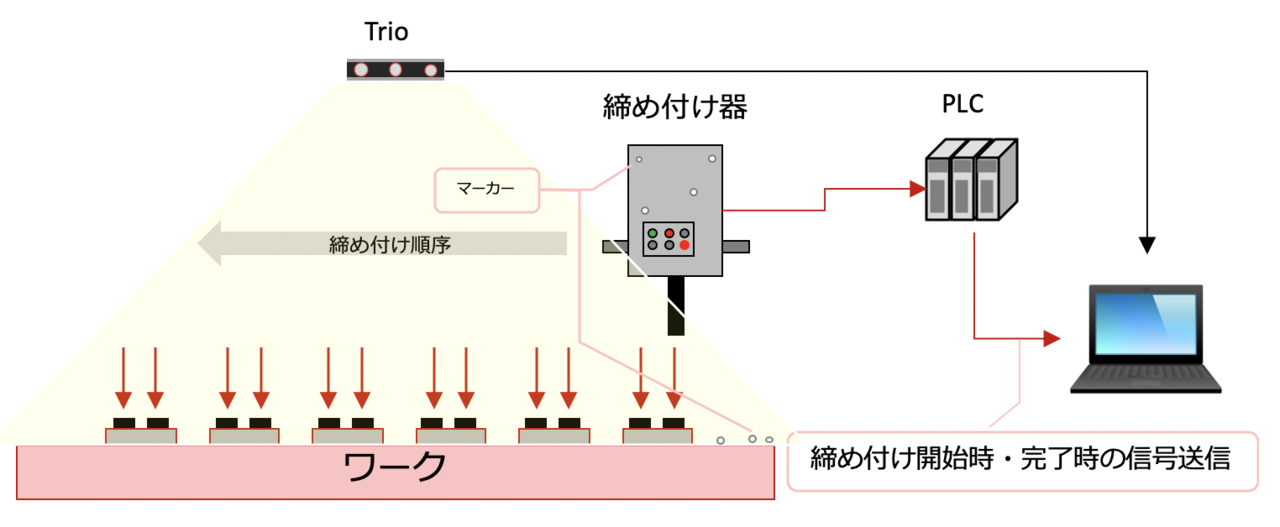
シーケンサー、PLC連携

モーションキャプチャ側からの信号をPLCに組み合わせ、機器・設備の制御を行う
具体例①:PLCナットランナーと連携。バーコード読み取り⇒ワーク対象の識別、締め付け開始時の位置検知、全箇所締め付け完了の信号送信など、PLCと連携して設備を制御
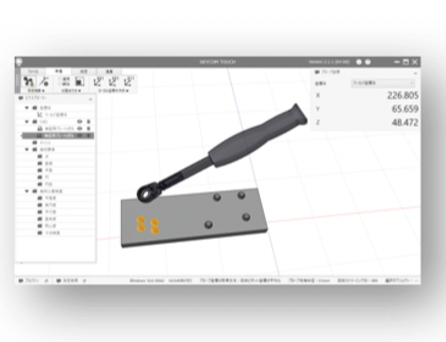
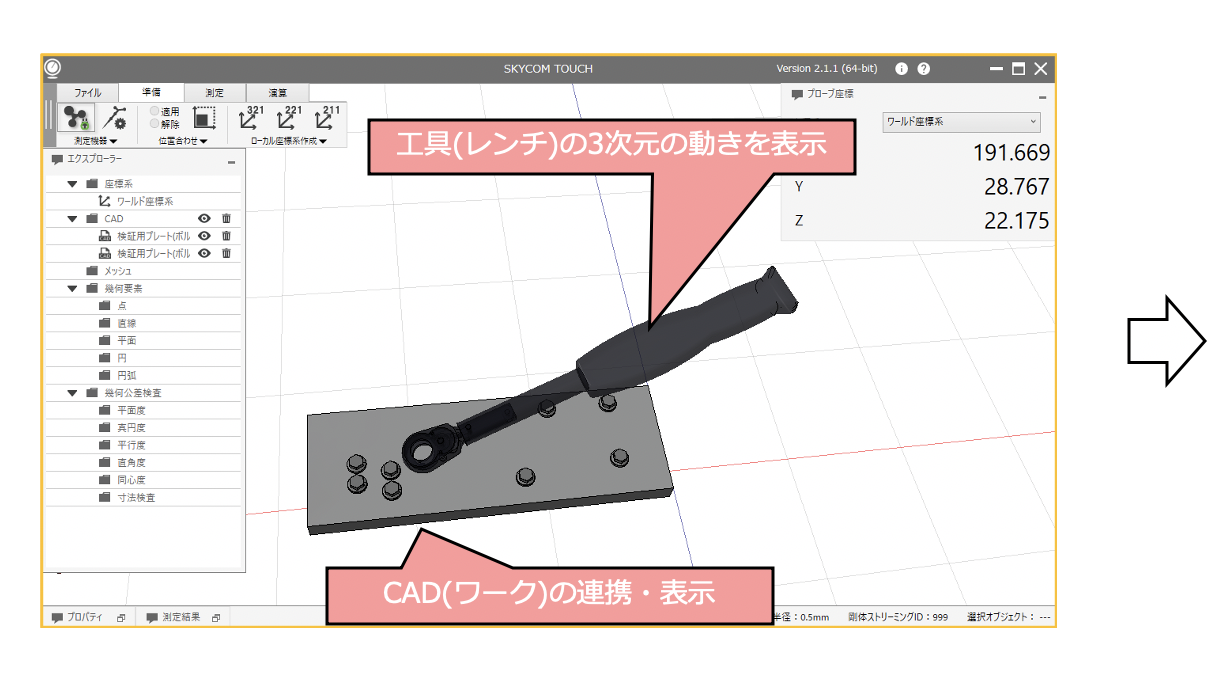
CADとの連携
座標系をワークに合わせ、ワークのCAD図面や、2D図面をリアルタイムで表示しながら作業
具体例①:工具がワーク上のどの位置にいるか表示、締め付け済みの箇所を色を変えて表示
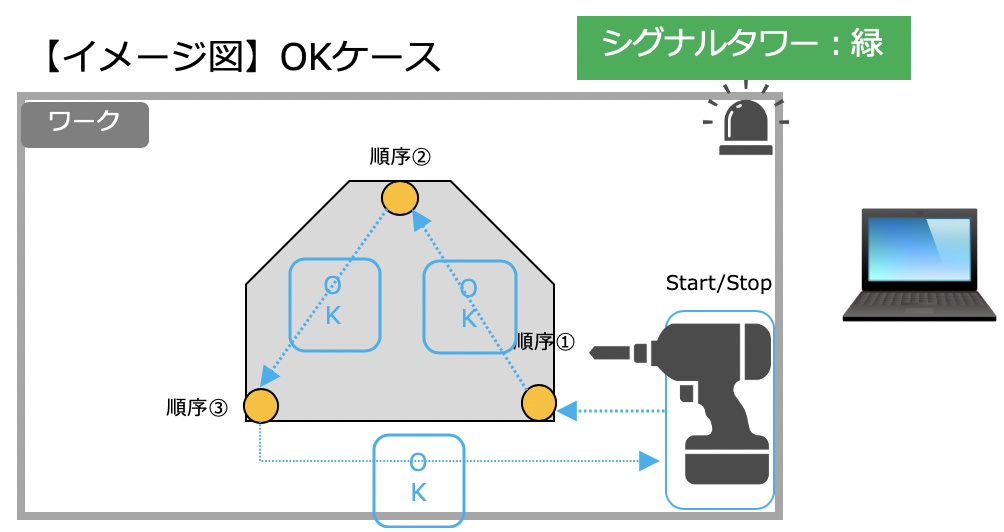
連携事例①:外部機器連携

ネジ締め判定システム
【ソフトウェア仕様】
•ドライバーの締め付け箇所に順序をつけ順序通りに締め付けが完了しないと、パトランプが赤く光、音でも警告する。
•順序間違い、ドライバーの角度がねじ穴に対して斜めになる、締め付け時間が短いなど、様々な項目で判定を行う。
•正解位置はドライバーを使って、ワンボタンでティーチング可能。
連携事例②:PLC連携
エンジン締め付け作業
【ソフトウェア仕様】
•バーコード読み取り時に自動でワーク図面表示:ワークのトラッキング可能。
•締付け器の仮締めの信号を受けて、指定位置内に締付け器の先端があるかを判定。範囲内であれば締付け開始。(範囲外の場合は締付けしない)
•画面上、締付けた位置をリアルタイムにフィードバック終了箇所は色で表示する。
•全工程終了したらPLCに信号送る。
連携事例③:工具連携、CAD連携
トルクレンチ締め付け管理システム
【ソフトウェア仕様】
•トルクレンチからの締め付け時のパルス信号と、工具の先端位置を組み合わせて判定。
•CAD取り込み可。座標系をCADと合わせリアルタイムで、CAD画面のどこにトルクレンチがあるか、どこを締めたか表示。
•トルク量も加え、画面に表示。
•市販のトルクレンチと連携可能。(機種によってはできない場合もある)
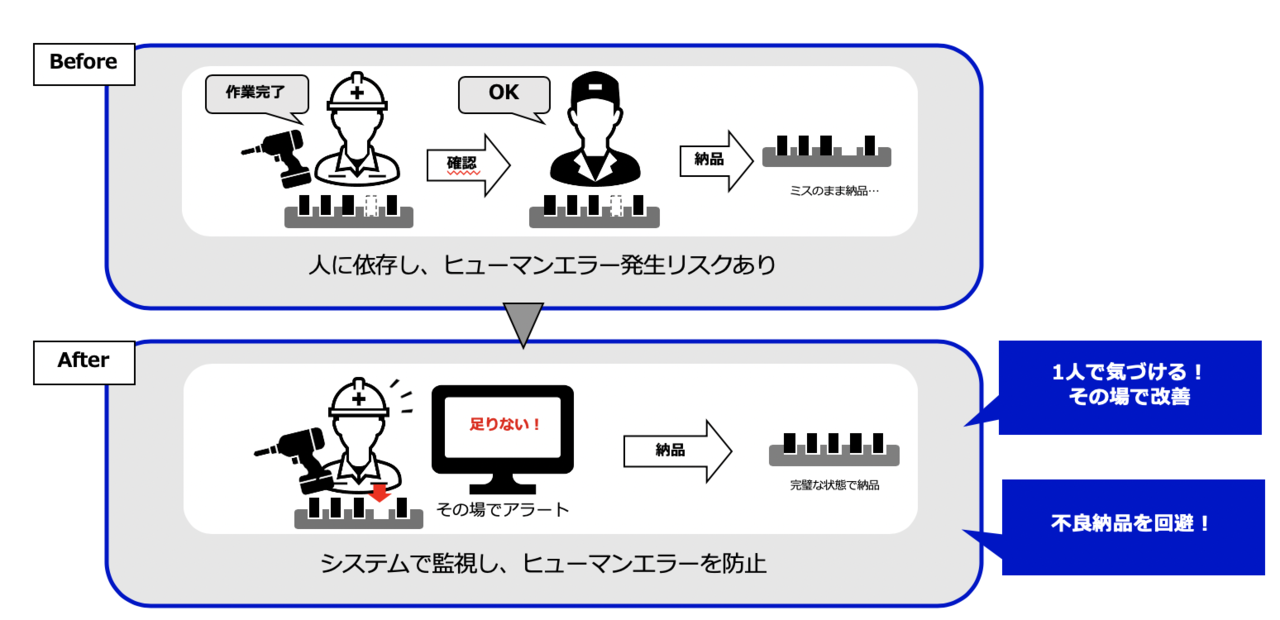
導入前、導入後をイラストでわかりやすく解析している画像です。
組立工程の部品ネジ締め

部品の組付けにおける、インパクトドライバーの順序通りの締め付け指定した順序通りにネジ締めが行われたかをパトランプでリアルタイムにOK/NG判定を行う
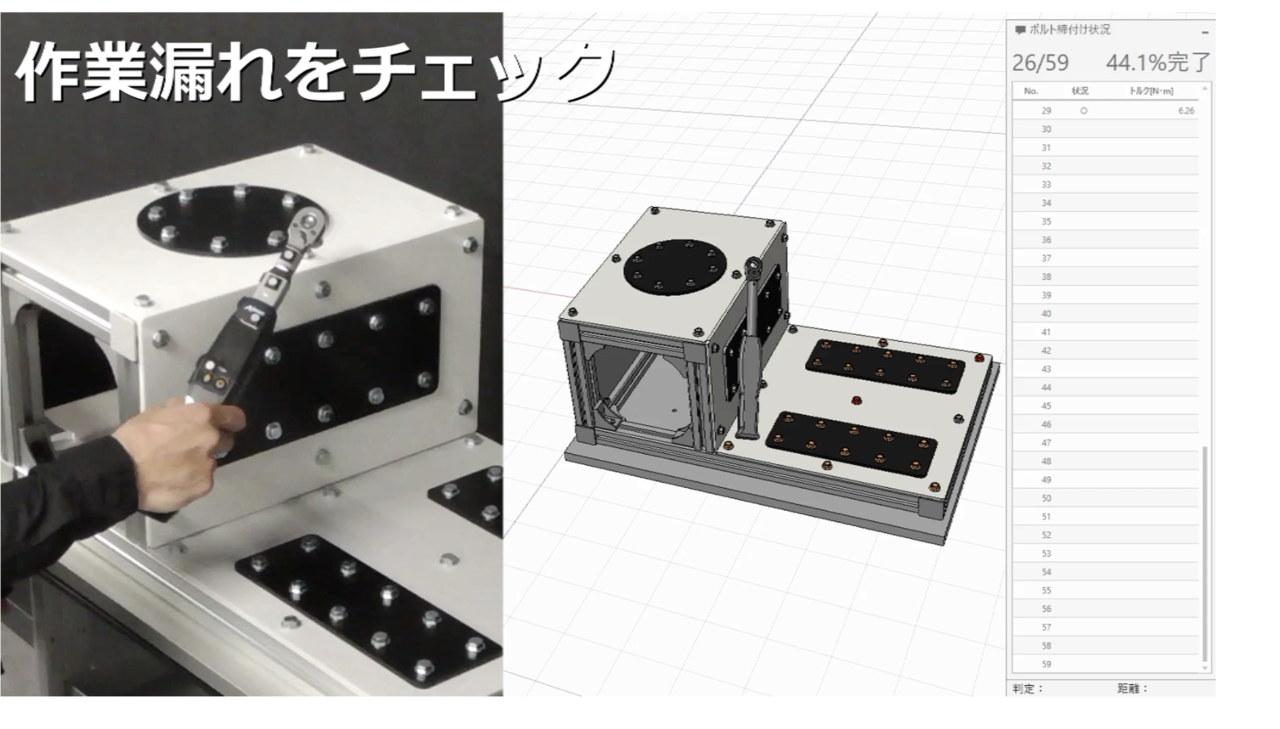
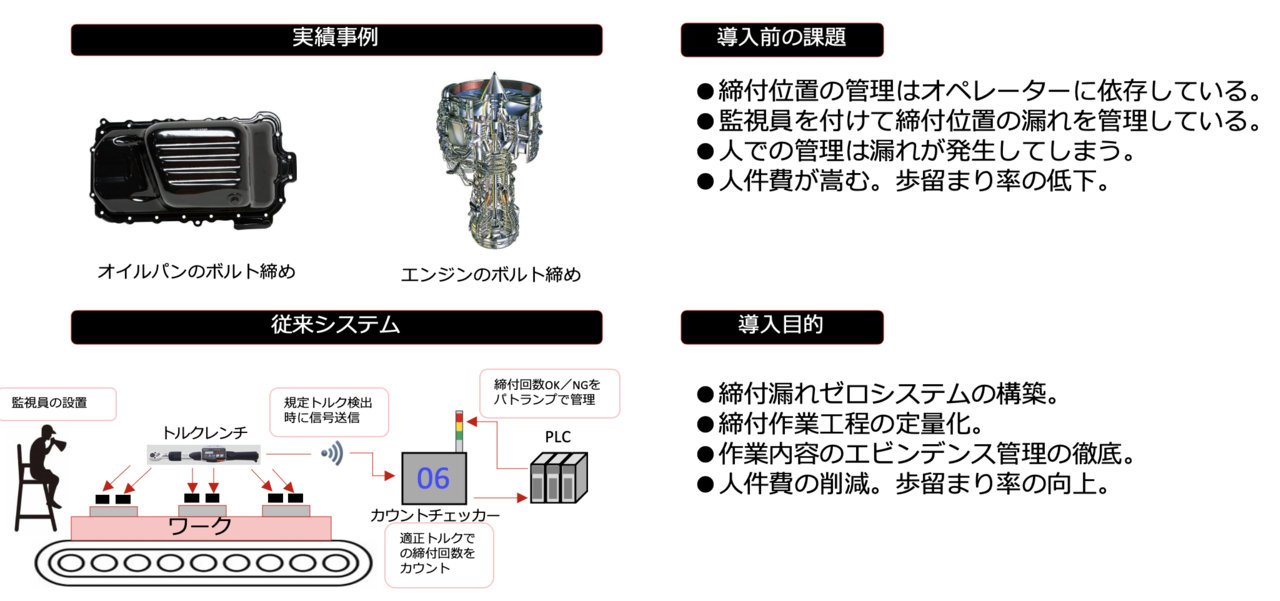
ワークのボルト締め用途
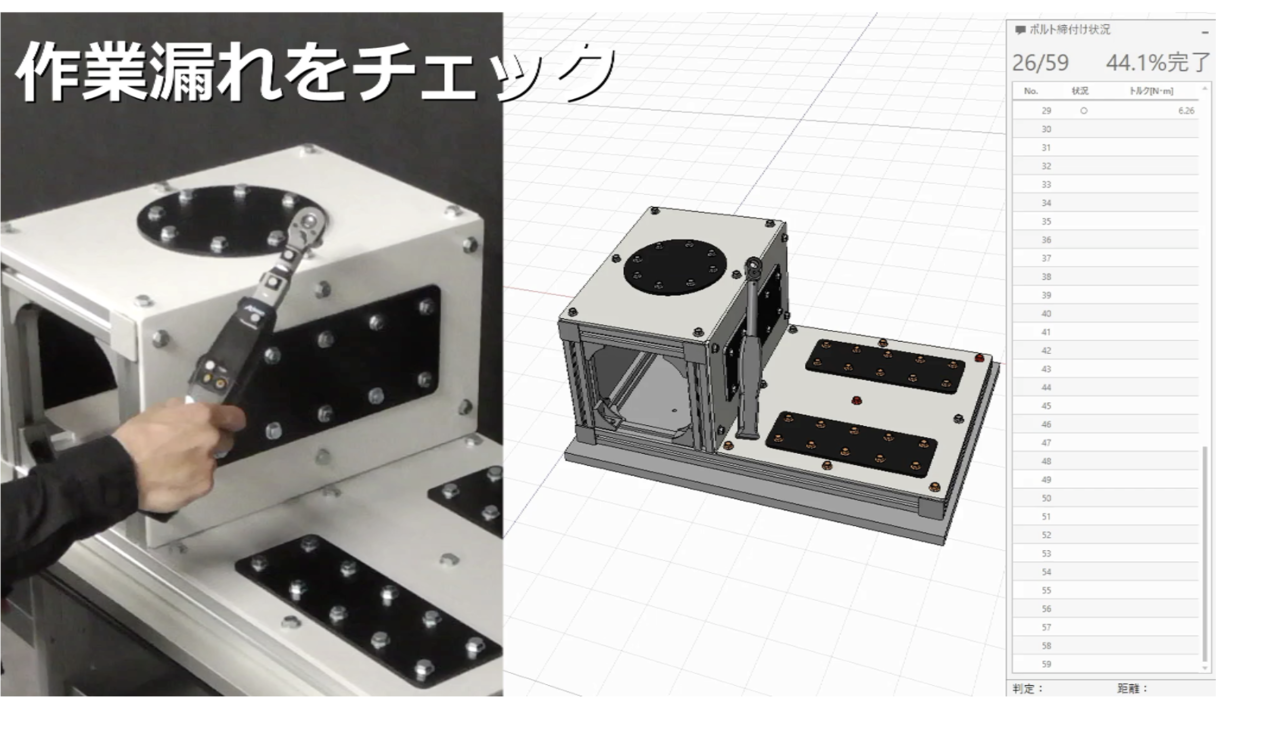
数十~数百カ所のネジ締め作業を締め付けトルク量とドライバーの先端位置を把握し、モニター上で数十~数百カ所の対象箇所が正しく締め付けられたかを判定。CADと連携しているため、締め付けた箇所はモニター上で色が変化し、残作業箇所が一目で判断できる。
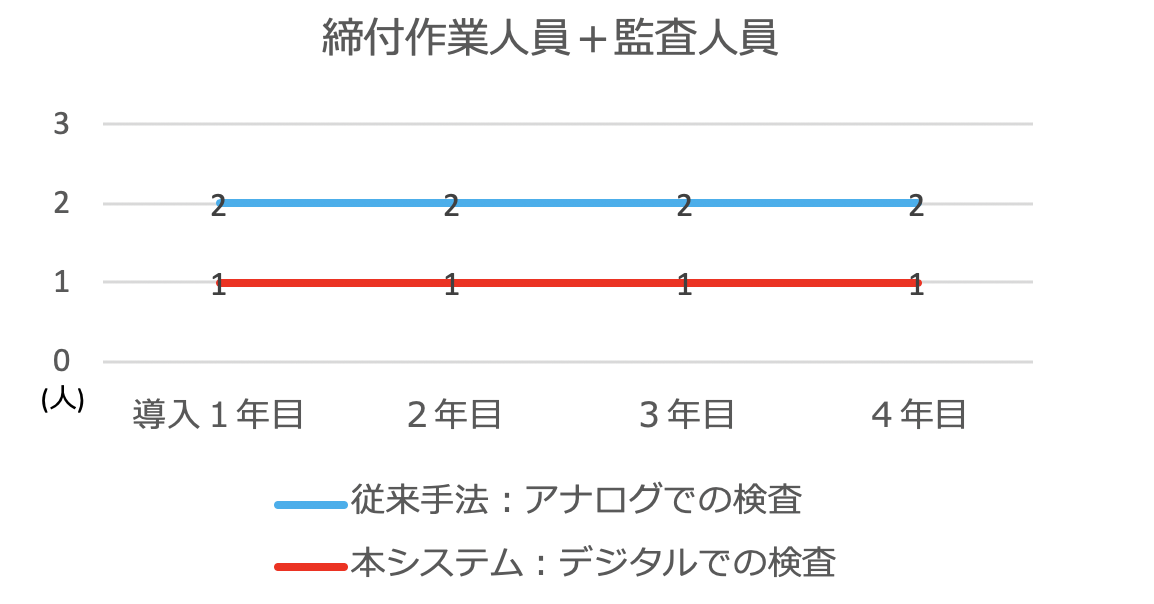
【導入前課題】
締め忘れ防止のためのトリプルチェックにかかる工数が大きい。チェック方法は確認後にシール貼付といったアナログな方法であり、ヒューマンエラーのリスクが残る。
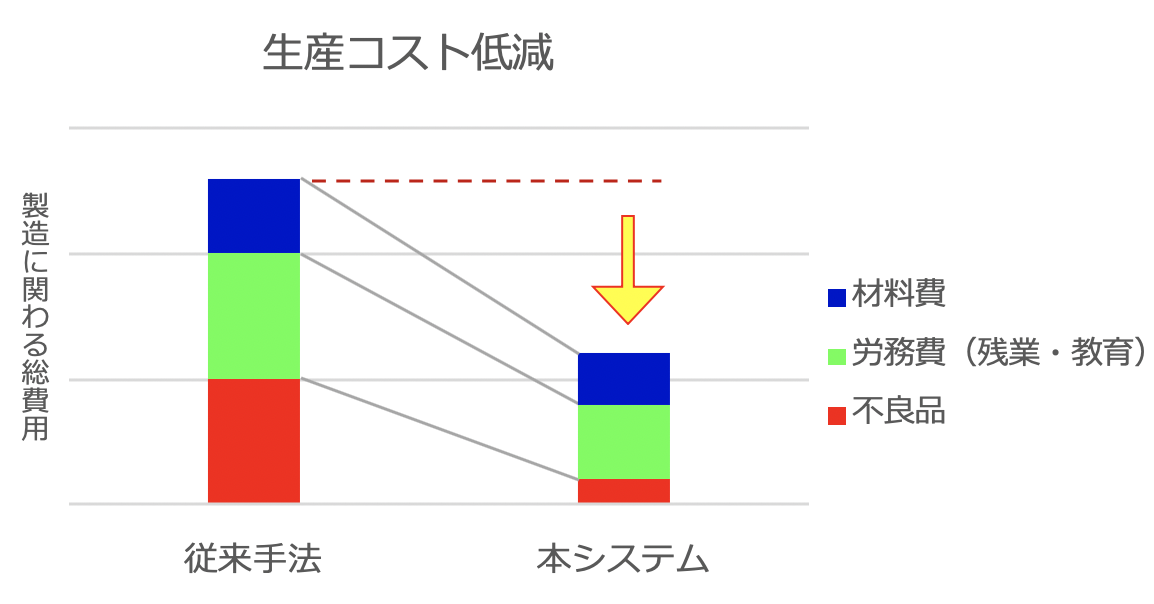
【導入後効果】
・作業工数減による、生産コスト低減
・ヒューマンエラーのリスクの排除
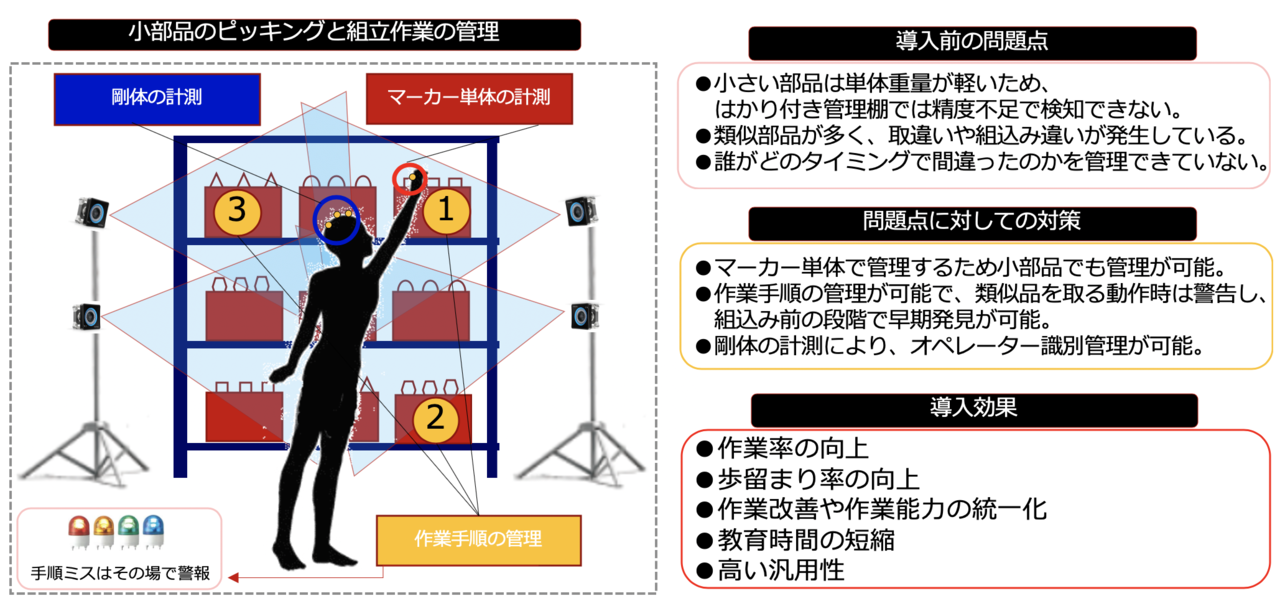
ピッキング部品のポカよけ

ピッキング作業において、部品の取り間違い、組み込み違いが発生することが多くある現場にて有効なシステムです。作業手順の管理ができるうようになり類似品の取り間違いを防止できます。
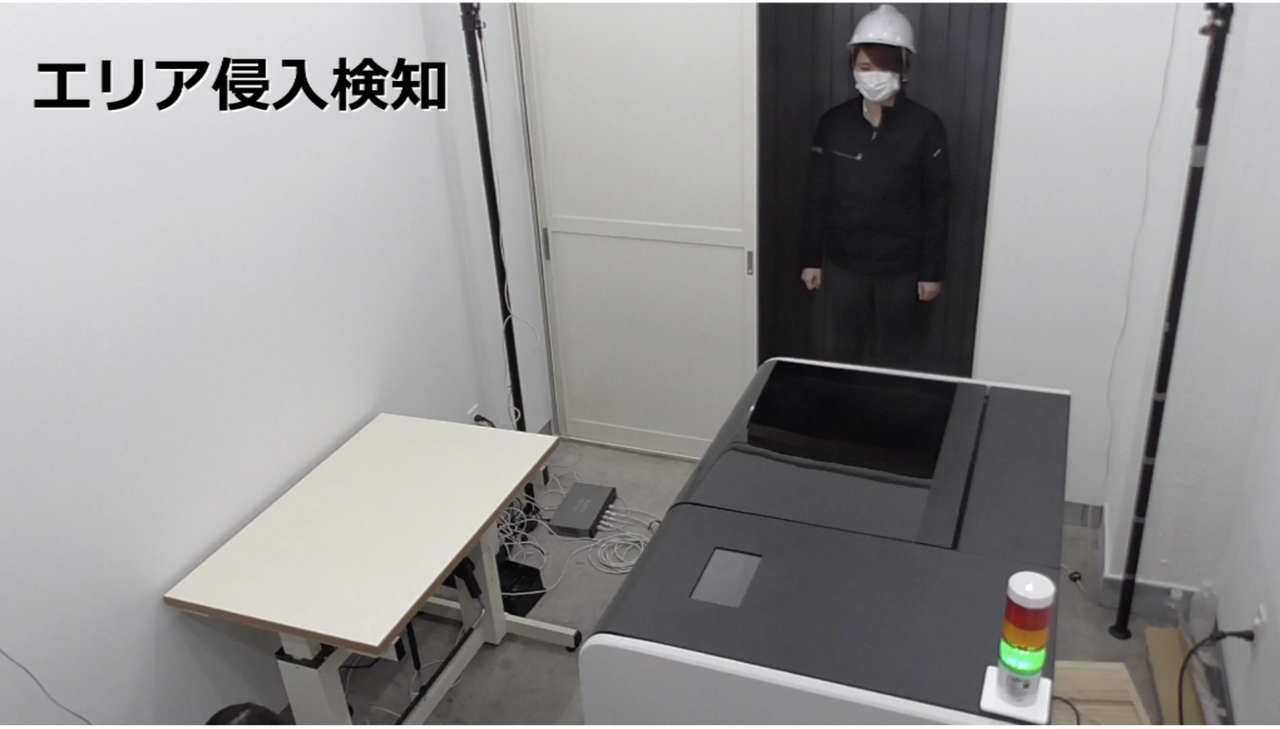
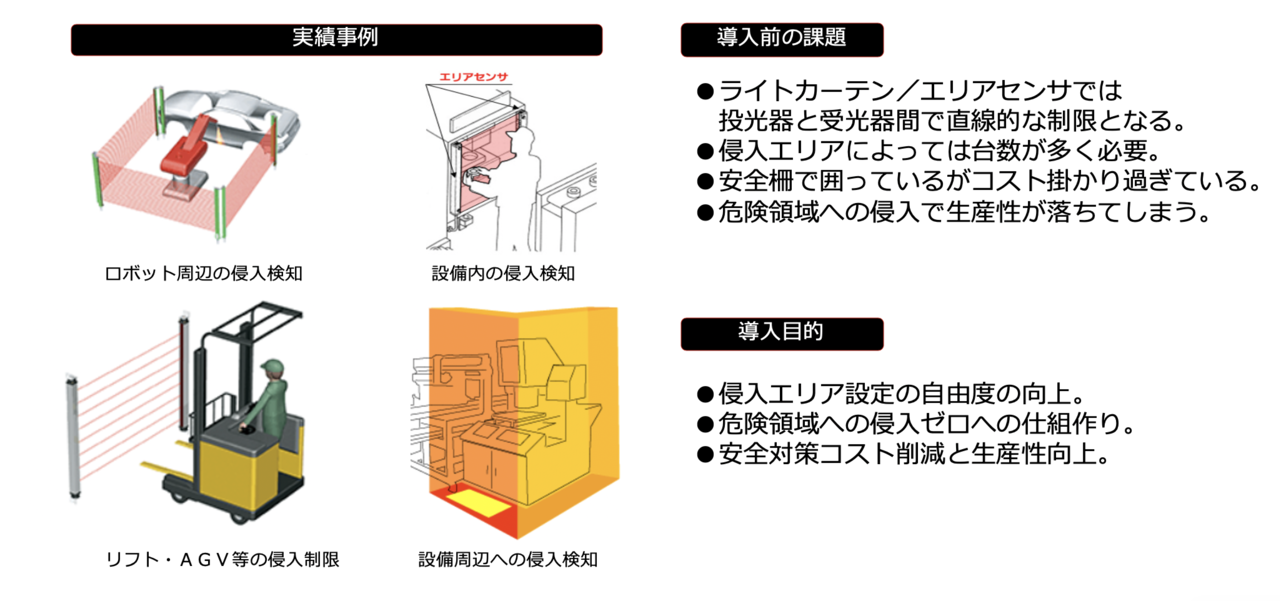
エリア侵入検知
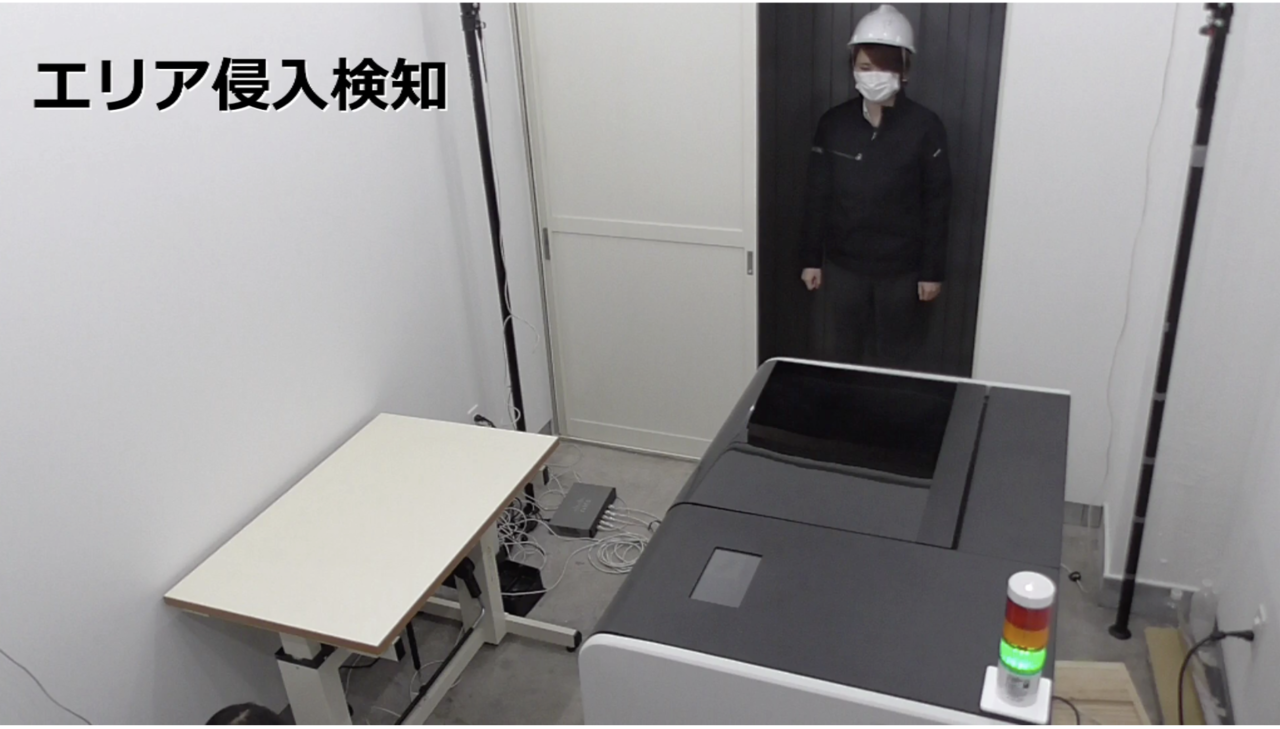
予め、危険エリアなどを設定し、作業者のヘルメットか腕などにマーカーを付けることで、位置をリアルタイムにトラッキングし、危険エリア侵入時に警告を出すシステムです。
作業者の安全を管理できるツールです。
お問合せフォーム
以下のフォームに必要事項をご記入の上、「送信する」ボタンをクリックしてください。
NEW & TOPICS
ソリューションご案内

拠点一覧
大阪本社
〒541-0053 大阪府大阪市中央区本町一丁目3番15号 本町NXビル3階
TEL:06-6311-3770
名古屋オフィス
〒460-0008 愛知県名古屋市中区栄5-26-39 GS栄3F
TEL:052-263-0039
東京オフィス
〒151-0072 東京都渋谷区幡ヶ谷
1-2-2 京王幡ヶ谷ビル4階
TEL:090-6038-8536
営業時間
9:00~18:00
フォームでのお問合せは24時間受け付けております。
定休日
土曜・日曜・祝日